cowbot
 cowbot3.tar.bz2
cowbot3.tar.bz2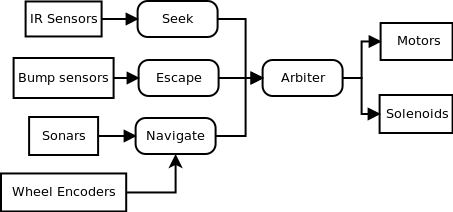
The "Cowbots" competition consists in a series of "duels" fought by autonomous robots. I built my robot around a Propeller, a 32-bit multicore microcontroller built by Parallax. I took advantage of the multiple cores to implement a behavior-based architecture, with different behavior finite state machines running on different cores. The robot has 11 sensors and 8 effectors.
The language is Spin, which was specially designed for the Propeller. The tarball includes a Vim syntax file for the Spin language I made, so you can program with the best editor. (Also available at github or vim).
The code for the robot with an accompanying writeup was hosted as a featured "customer application" in the Propeller's website, (for which I got some free stuff), but since then the site has been rehauled and the link is sadly gone.
All the code is GPLv3, except for third party modules which have their own licenses (mostly public domain; see the comments in each file).